
Chińska baza na Księżycu staje się elementem długofalowej strategii Pekinu. Chińscy naukowcy pokazali koncepcję robotów, które miałyby budować i obsługiwać przyszłą stację badawczą w rejonie południowego bieguna Księżyca, a kierunek ten wpisuje się w założenia 15. planu pięcioletniego Chin.
Chińska baza na Księżycu przestaje być jedynie koncepcją, a staje się elementem szerszej strategii państwowej. Za nową prezentacją robotycznych maszyn stoi logika łącząca rozwój ucieleśnionej inteligencji, rozbudowę sektora kosmicznego oraz przygotowanie zaplecza dla stałej działalności człowieka poza Ziemią.
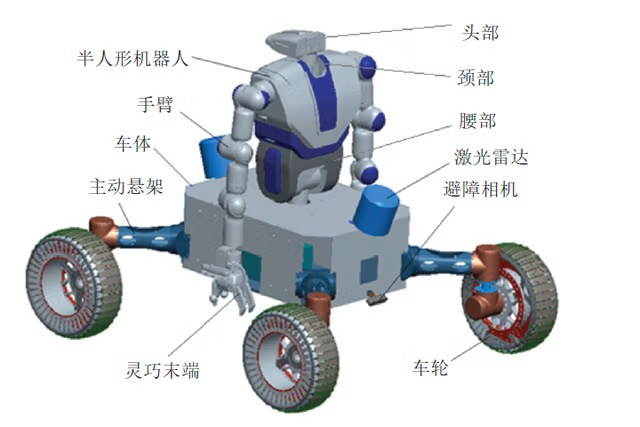
Według przedstawionej koncepcji w budowie przyszłej bazy miałyby uczestniczyć co najmniej dwa typy maszyn. Pierwsza to półhumanoidalny robot wyposażony w kołową platformę oraz ruchomą górną część ciała zdolną do wykonywania prac budowlanych, konserwacyjnych i badawczych. Druga to platforma transportowa przeznaczona do zadań logistycznych na powierzchni Księżyca.
Robotyczna infrastruktura księżycowej stacji
(Źródło: Journal of Deep Space Exploration / Beijing Institute of Spacecraft System Engineering)
Robot opracowany przez Instytut Inżynierii Systemów Statków Kosmicznych w Pekinie łączy mobilną bazę na kołach ze zwinną górną częścią ciała przypominającą humanoidalnego robota. Konstrukcja została zaprojektowana tak, aby mogła wykonywać różnorodne zadania – od prac budowlanych i konserwacyjnych, przez pobieranie próbek geologicznych, aż po prowadzenie podstawowych analiz naukowych.
Maszyna posiada obracającą się talię, która może skręcać o około 180 stopni w obu kierunkach i pochylać się do przodu nawet o 90 stopni. Przegubowa dłoń oferuje cztery stopnie swobody, co pozwala na precyzyjną manipulację narzędziami i elementami infrastruktury.
Koła robota wykonano z metalowej siatki ze stalowymi bieżnikami, które mają amortyzować wstrząsy i zapewniać stabilność na nierównym terenie. Konstrukcja została przystosowana do pracy w ekstremalnych temperaturach i próżni. Projektanci podkreślają, że rozwiązanie to wykorzystuje doświadczenia zdobyte przy budowie chińskich łazików księżycowych Yutu oraz marsjańskiego łazika Zhurong.
Równolegle zespół zaproponował również oddzielną platformę transportową przeznaczoną do zadań logistycznych. Maszyna miałaby lądować na powierzchni Księżyca, a następnie przewozić ładunki pomiędzy elementami infrastruktury przyszłej bazy, tworząc wraz z robotami budowlanymi spójny system robotyczny.
Ekonomiczny transport ładunków na Księżyc
Równolegle do prac nad robotami rozwijany jest także system transportu potrzebny do budowy infrastruktury na Księżycu. Chińska Agencja Lotów Kosmicznych Załogowych poinformowała, że zakończono wybór koncepcji ekonomicznego systemu transportu ładunków na Księżyc i rozpoczęto jego rozwój.
Państwowy wykonawca sektora kosmicznego zaprezentował także koncepcję „ekonomicznego transportu ładunków księżycowych”, który ma umożliwić realizację budowy na większą skalę i obniżyć koszty logistyczne przyszłej infrastruktury.
Program Chang’e i droga do bazy
Roboty mają odegrać ważną rolę w budowie Międzynarodowej Stacji Badawczej na Księżycu (ILRS), którą Chiny rozwijają razem z partnerami międzynarodowymi. Według danych z 2025 roku projekt przyciągnął już 17 państw oraz ponad 50 instytucji naukowych.
Program księżycowy Pekinu zakłada kilka etapów przygotowań. Misja Chang’e-7 ma zbadać środowisko południowego bieguna Księżyca i poszukiwać lodu wodnego, który może stać się ważnym zasobem dla przyszłych baz. Kolejna misja Chang’e-8 planowana około 2028 roku ma przetestować wykorzystanie lokalnych surowców, w tym drukowanie 3D elementów konstrukcyjnych z księżycowego regolitu.
Na bazie tych doświadczeń ma powstać podstawowy model Międzynarodowej Stacji Badawczej na Księżycu około 2035 roku. W dalszej perspektywie planowana jest rozbudowa infrastruktury oraz stworzenie rozproszonej sieci instalacji badawczych do około połowy stulecia.
Księżyc w strategii technologicznej Chin
Projekt księżycowy wpisuje się w szerszą strategię rozwoju technologicznego Pekinu. W 15. planie pięcioletnim Chiny wskazały rozwój ucieleśnionej inteligencji, robotów humanoidalnych oraz zaawansowanych systemów automatycznych jako jeden z priorytetów przyszłej gospodarki.
Jednocześnie plan przewiduje przyspieszenie rozwoju sektora kosmicznego, w tym technologii rakiet wielokrotnego użytku, ciężkich systemów nośnych oraz infrastruktury orbitalnej. Dokument wskazuje również na dalszy rozwój eksploracji głębokiego kosmosu i programu badań Księżyca, w tym budowę Międzynarodowej Stacji Badawczej na jego powierzchni.
Równolegle Chiny rozwijają także program załogowych lotów księżycowych. Trwają prace nad rakietą Long March-10, statkiem załogowym Mengzhou oraz lądownikiem księżycowym Lanyue. Pierwsze chińskie załogowe lądowanie na Księżycu planowane jest przed rokiem 2030.
W tym kontekście robotyczna infrastruktura budowy bazy może okazać się jednym z kluczowych elementów przygotowań do długotrwałej obecności człowieka na powierzchni Srebrnego Globu.









